When a Modbus COM port device is inserted in the tree, only static assignment of the parameters is possible.
If it is necessary for the assignment to be dynamic, then the complete handling must be implemented in the IEC code
Please note that the I/O Manager does not synchronize the different processes in the dynamic configuration.
This can cause the update behavior of the variables to differ from the static configuration, especially if it is accessed from several tasks.
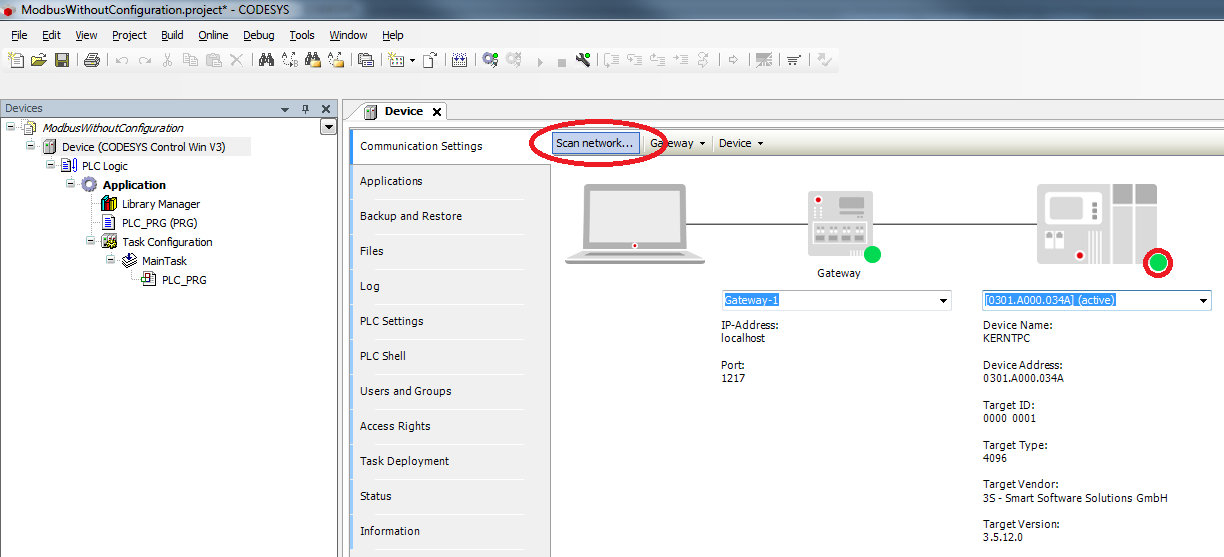
- Create a "Standard project" and select CODESYS Control Win V3 as the device.
- Define the target system by means of the Network scan.
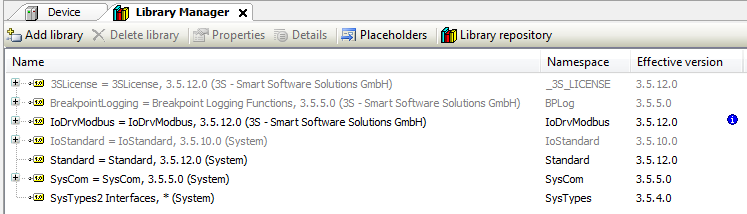
- Open the Library Manager and add the Netzwork library.
- IoDrvModbus
- SysCom
- SysTypes2 Interfaces
Adapt the POU PLC_PRG as follows:
Declaration
VAR xComPortOpen : BOOL; xComPortError : BOOL; rtsResult : RTS_IEC_RESULT; stComPortSettings : SysCom.ComSettings; hComPort : RTS_IEC_HANDLE; awReadBuffer : ARRAY[0..31] OF WORD; //note: adjsut to your requirements, max. is 128 Modbus Registers awWriteBuffer : ARRAY[0..31] OF WORD; xExec : BOOL; fbModbusRequest : IoDrvModbus.ModbusRequest2; eComError : IoDrvModbus.MB_ErrorCodes; END_VARImplementierung
IF(NOT xComPortOpen AND NOT xComPortError) THEN stComPortSettings.sPort := 3; stComPortSettings.byStopBits := 1; stComPortSettings.byParity := 0; //EVEN:=2, ODD:=1 or NONE:=0* stComPortSettings.ulBaudRate := 19200; //1200, 2400, 4800, ..., 115000 bps stComPortSettings.ulTimeout := 0; stComPortSettings.ulBufferSize := 256; //Equals max size of Modbus packet hComPort := SysCom.SysComOpen2( pSettings := ADR(stComPortSettings), pSettingsEx := 0, pResult := ADR(rtsResult)); xComPortError := (hComPort = RTS_INVALID_HANDLE OR rtsResult <> 0); xComPortOpen := NOT xComPortError; END_IF IF(xComPortOpen) THEN //apply new command fbModbusRequest.modbusCommand.uiFunctionCode := 23; //Reda/Write Multiple Register fbModbusRequest.modbusCommand.uiReadOffset := 0; fbModbusRequest.modbusCommand.uiReadLen := 2; fbModbusRequest.modbusCommand.uiWriteOffset := 0; fbModbusRequest.modbusCommand.uiWriteLen := 2; fbModbusRequest.pRecvData := ADR(awReadBuffer); fbModbusRequest.pSendData := ADR(awWriteBuffer); fbModbusRequest.tResponseTimeout := T#500MS; //note: if different tasks access the IO-Buffers then use some intermediate buffers // that are thread safe (use e.g mutex or semaphore) before calling the FB fbModbusRequest( hComPort := hComPort, xExecute := xExec, usiSlaveAddr := 2, byModbusError => eComError); IF(fbModbusRequest.xDone) THEN //here you get valid data IF(awWriteBuffer[0] = awReadBuffer[0]) THEN ; END_IF ELSIF(fbModbusRequest.xError) THEN IF(eComError = MB_ErrorCodes.RESPONSE_TIMEOUT) THEN //no cable plugged, wrong Com-Port settings ? ; END_IF END_IF END_IF
- Start the project and test the functionality.